هدایت بر بستر سیمکشی
تراک Cybertruck از کنترل چرخش کنترلشده با سیم برای جایگزینی روش مکانیکی سنتی خودرو استفاده میکند، که کنترل را کاملتر میسازد. این همچنین گامی ضروری برای ورود به رانندگی هوشمند سطح بالا است.
سیستم هدایت بر بستر سیمکشی چیست؟ به طور ساده، سیستم هدایت بر بستر سیمکشی ارتباط فیزیکی بین فرمان و چرخ را کاملاً لغو میکند و از سیگنالهای الکتریکی برای کنترل فرمان چرخ استفاده میکند.

سیستم هدایت بر بستر سیمکشی نه تنها تمام مزایای سیستم فرمان مکانیکی سنتی را دارد، بلکه میتواند ویژگیهای انتقال زاویهای را به دست آورد که با سیستمهای مکانیکی دشوار است بهینهسازی شود.
سیستم هدایت بر بستر سیمکشی فناوری جدیدی نیست. تولیدکنندگان مختلف مدتها است که این فناوری را توسعه دادهاند، از جمله تویوتا، فولکسواگن، دیوار بزرگ، BYD، NIO و غیره، و همچنین شرکتهای معتبر جهانی Tier 1 مانند بوش، کانتیننتال و ZF در حال توسعه و پیادهسازی سیستمهای هدایت بر بستر سیمکشی هستند، اما تنها تراک Cybertruck شرکت تسلا به صورت انبوه در واقعیت تولید شده است.

بنابراین، عملکرد بعدی Cybertruck بسیار پیشرو در بازار است. در عین حال، این فناوری همچنین فناوری اصلی «شاسی لغزنده» است، بنابراین وضعیت تولید انبوه آن بسیار معنادار است.
اگرچه فناوری هدایت بر بستر سیمکشی میتواند مکانیزم انتقال سنگینتر و قدیمیتر نسبت به فناوری سنتی را حذف کند و خودرو را سبکتر (سبک به معنای هزینه کم و دوام بلند) و کمهزینهتر کند، اما برقیسازی کنترل از طریق سیگنالها انجام میشود. اگر مشکلی پیش بیاید، عواقب بسیار جدی خواهد بود. بنابراین، زمانی که این فناوری برای اولین بار در هواپیماهای نظامی استفاده شد، طراحی دوگانهای برای بیمه مضاعف اتخاذ شد.
در حال حاضر، فناوری هدایت بر بستر سیمکشی در خودروها به طور گستردهای استفاده میشود، عمدتاً در خودروهای دیفرانسیل عقب، و به ندرت در خودروهای دیفرانسیل جلو. دلیل اصلی این است که این فناوری نباید هیچ مشکلی داشته باشد، و خرابیهای سیگنال الکتریکی میتواند به دلایل مختلفی مانند قطع برق باتری، تأخیر در سیگنال و از دست رفتن آن، رخ دهد.

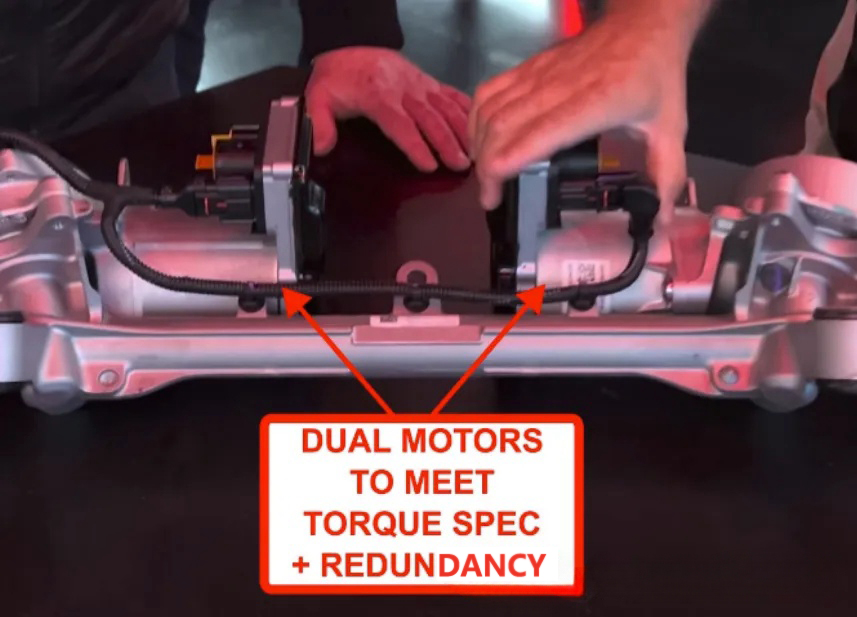
برای جلوگیری از تمام شدن ناگهانی باتری، تراک Cybertruck نه تنها از سیستم باتری ۴۸ ولت برای تغذیه موتور در سمت چپ تصویر زیر استفاده میکند، بلکه به برق با ولتاژ بالا نیز متصل است. همچنین دو باتری پشتیبان وجود دارد تا اطمینان حاصل شود که باتری خاموش نیست و این نیز طراحی دوگانهای است.
سیستم هدایت بر بستر سیمکشی تراک Cybertruck از دو موتور استفاده میکند، هر کدام قادر به تولید حدود ۵۰-۶۰۱ نیوتن متر گشتاور در حالت پارک با سرعت پایین. اگر یکی خراب شود، هنوز یک موتور برای ارائه افزونگی در دسترس است. همان موتور (فقط یکی) برای رانندگی سیستم فرمان عقب استفاده میشود. این موتور میتواند احساس بازخورد شبیهسازی شده به راننده بدهد، که بسیار مهم است. بدون این بازخورد، راننده کمتر قادر به درک وضعیت فرمان چرخ است، و همچنین میتواند دادههای تایر و زمین را به واحد تحلیل منتقل کند تا تجربه رانندگی بهتری ارائه دهد. برای مثال، هنگام چرخش جهت، میتواند بهترین چسبندگی بین تایرها و زمین را حفظ کند.
از آنجا که سیگنالهای الکتریکی جایگزین کنترل مکانیکی سنتی شدهاند، اثربخشی و زمانبندی انتقال سیگنال بسیار مهم است. تراک Cybertruck از ارتباط اترنت برای جایگزینی ارتباط CAN سنتی استفاده میکند. این سیستم دارای سیستم اترنت گیگابیت است که دادهها را منتقل میکند و نیازهای ارتباط سریع را برآورده میسازد، شبکه دادهها تنها نیم میلیثانیه تأخیر دارد، که آن را برای سیگنالهای چرخش ایدهآل میسازد، و همچنین پهنای باند کافی برای ارتباط در زمان واقعی کنترلکنندههای مختلف فراهم میکند.

پهنای باند اترنت بیشتر از ارتباط CAN است. کل خودرو میتواند یک زنجیره داستی مشترک داشته باشد. با استفاده از فناوری POE، رابط اترنت میتواند مستقیماً برقدار شود بدون نیاز به مجموعه جداگانه منبع تغذیه کمولتاژ، که میتواند هزینه سیمکشی را به طور قابل توجهی کاهش دهد. این فناوری همچنین با سرعت در حال تجاریسازی و پیادهسازی است، همراه با تجاریسازی سریع و پیادهسازی اینترنت درون خودرو و رانندگی هوشمند آینده.
خلاصه:
اگرچه فناوری هدایت بر بستر سیمکشی چندان پیشرفته نیست، اما در دستهای از خودروها استفاده شده است. حداقل لکسوس قبلی در تلاش برای کنترل خودرو با این فناوری با مشکلات زیادی مواجه شد.
این نوع حذف مستقیم کنترل مکانیکی حسگرهای سنتی از طریق سیگنالهای الکتریکی، هرچند کیفیت بالا و قیمت پایین دارد، میتواند تجربه رانندگی بهتری برای رانندگان فراهم کند، اما اساسیترین نیاز خودروها ایمنی است. عوامل خرابی در سیگنالهای الکتریکی در سطوح مختلف وجود دارد.
ترویج پیشرفت فناوری نیازمند تأیید بازار و زمان است. اگر این فناوری در آینده بسیار محبوب شود و پایدار بماند، فناوری یکپارچه «اسکیتبرد برقی» بیشتر بهبود خواهد یافت.